ISO 9409-1: Die Schnittstelle zwischen Roboter und Werkzeug
Share
Die ISO 9409-1 ist eine internationale Norm, die die mechanische Schnittstelle zwischen einem Industrieroboter und seinem Werkzeug definiert – also z. B. zwischen einem Roboterarm und einem Greifer, Sauger oder Schweißbrenner.
Herstellerübergreifend sorgt diese Norm für Kompatibilität und Austauschbarkeit, denn sie legt standardisierte Maße wie den Teilkreisdurchmesser (PCD), den Zentrierbund, Bohrbilder und Außendurchmesser des Flansches fest. Dadurch lassen sich Werkzeuge schnell und sicher an unterschiedlichsten Robotern montieren – ohne Adapter oder Sonderlösungen.
Egal ob kleiner Cobot oder Schwerlastroboter: Mit ISO 9409-1 wird der Werkzeugwechsel zum Kinderspiel. Wer Automatisierung modular denkt, kommt an dieser Norm nicht vorbei.
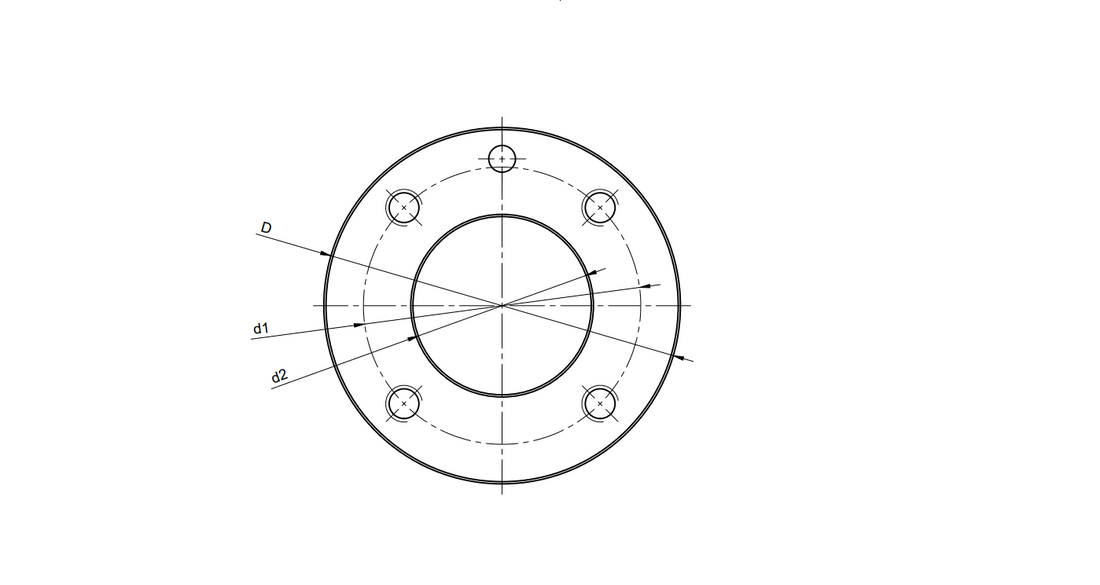
Gängige Flansche und die dazugehörigen Abmessungen:
| Bezeichnung | D - Außendurchmesser | d1 - Teikreisdurchmesser | d2 - Durchmesser Zentrierbund | l1 - Tiefe Zentrierbund | Bohrungen |
Normbezeichnung Flansch
|
| [mm] | [mm] | [mm] | [mm] | Anzahl x Gewinde | ||
| ISO 40 | 40 | 31,5 | 20 | 2,5 | 4 x M6 | ISO 9409-1-31,5-4-M6 |
| ISO 50 | 50 | 40 | 25 | 3 | 4 x M6 | ISO 9409-1-40-4-M6 |
| ISO 63 | 63 | 50 | 31,5 | 3,5 | 4 x M6 | ISO 9409-1-50-4-M6 |
| ISO 80 | 80 | 63 | 40 | 4 | 6 x M6 | ISO 9409-1-63-6-M6 |
| ISO 100 | 100 | 80 | 50 | 5 | 6 x M8 | ISO 9409-1-80-6-M8 |
Einige Roboter und ihre Toolflansche:
ISO 9409-1-50-4-M6: Universal Robots: UR3e, UR5e, UR10e, UR16e; Yaskawa: HC10, HC20, GP-4 bis GP20
ISO 9409-1-80-6-M8: Universal Robots: UR20 & UR30, Yaskawa: GP-35
Alle Angaben ohne Gewähr.