piab
grasp monkey - gripper for bags
grasp monkey - gripper for bags
excl. VAT
Couldn't load pickup availability
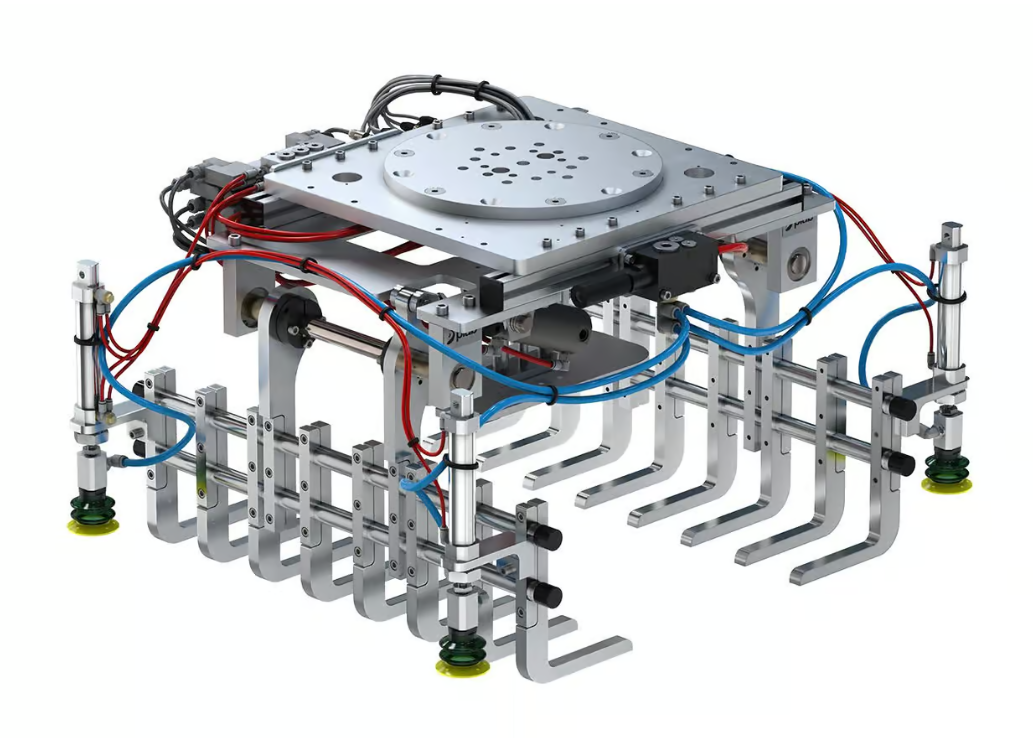
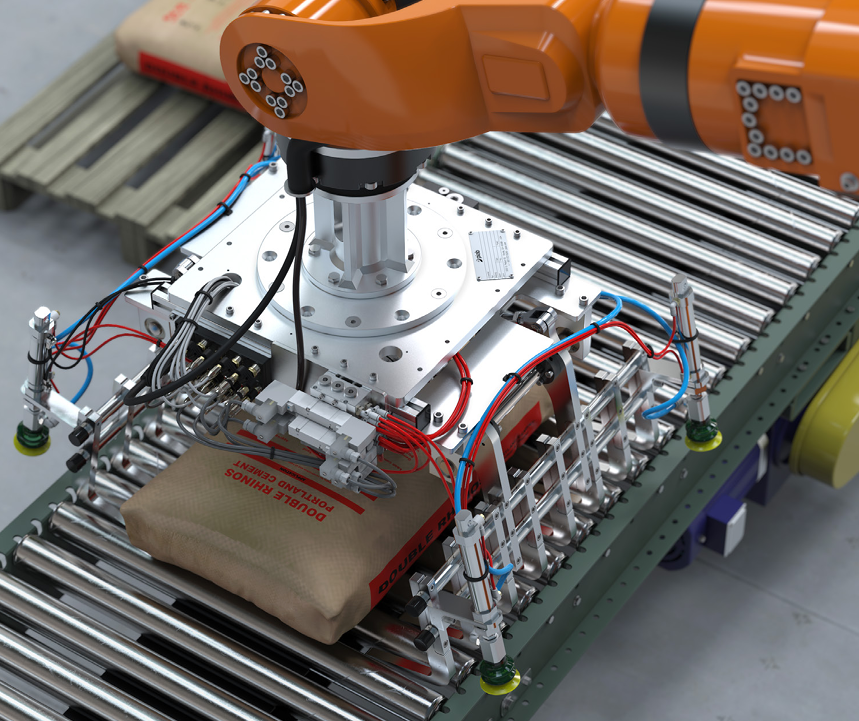
The pneumatically driven bag gripper from grasp monkey is a versatile mechanical gripper that was specially developed for handling bags. It is ideal for materials that are difficult or impossible to handle using suction techniques. Thanks to its excellent power density, it is an efficient alternative to conventional vacuum and suction cup grippers. The gripper can be operated on both articulated arm robots and Cartesian gantries.
The gripper picks up bags from roller conveyor systems.
Specification:
| Max. payload | 35 kg |
| Weight | 7.6 kg |
| bag length | 250 mm - 550 mm |
| bag width | 80 mm -225 mm |
| bag height | 40 mm - 130 mm |
| roller pitch of the roller conveyor | 90 mm |
| sensors | Product sensor (light sensor), position pneumatic cylinder |
This item is available in various configurations. Please contact us before placing your order so that together we can find the ideal configuration for you.
Made to order item, delivery time approx. 2-4 weeks
Share